Combining our expertise with the latest remote technology, we deliver industry-leading solutions
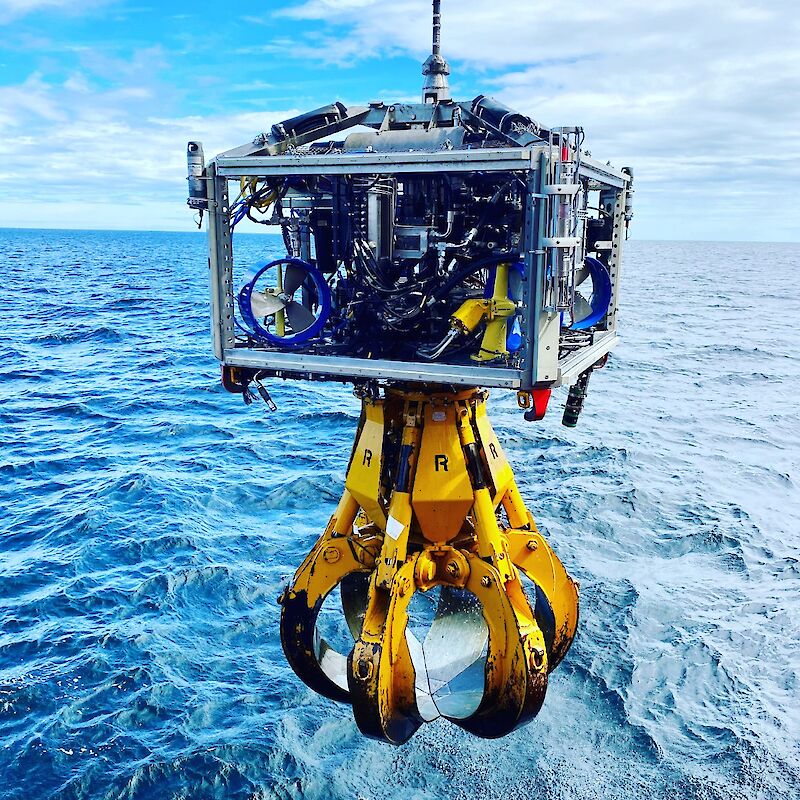
Boulders and debris can pose a significant challenge for developers, potentially leading to extensive layout alterations and rerouting; adding considerable time and expense. Our industry-leading techniques offer a highly efficient solution to the challenge of boulder relocation and debris clearance on site. Applying our years of experience, we created the Subsea Multi-Tool (SMT) ROV; a powerful, cost-effective and flexible deployment platform capable of satisfying various subsea requirements.